RoboCup Japan Open 2003
This event was celebrated in Niigata Japan from April 29 to May 4
2003. My team was composed only by my wife, my two children
and me. We obtained one of the 6 best scores out of 12 teams. This time, AIBO participated as a goalkeeper. Balls were thrown and AIBO had
to stop them in order to avoid the goal. It had to recognize when the ball
was coming and throw his body to the place where the ball was supposed to
enter into the goal. There was one condition:
its body only could occupy maximum 50 percent of the goal. So
that, its body had to keep its position perpendicular to the goal.
In order to do this, I developed a neural network system which was
able to know what to do in case of any strong change in its body
position. Looking the angles given by the white laterals lines and
the position of this two lines, AIBO was able to know how to
return to its original position.
The developed neural network had one hidden layer, 6 input units and
6 output units. Every time the robot was looking to the left and
to the right, it measured the distance from the bottom to the white line
in pixels in three different places. Figure 1 shows an example.
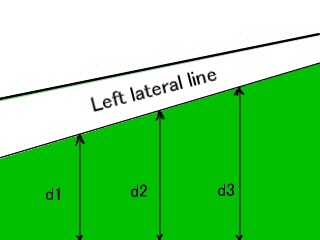
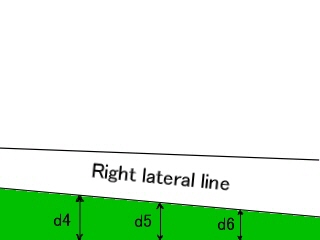
Figure 1. Distances from the bottom to the white
lateral line
in the soccer field.
Three distances were measured to the left and three to the right.
They were the 6 input units to the neural network. As the output,
6 different commands were codified. Depending on the
configuration of the 6 input distances, a different command was produced
like "go left", "go right", "move to the left using only the front
legs", "move to the right using only the rear legs". etc. As
a result, the robot always was able to return to the initial position
just by looking a pair of times to the left and then to the right.
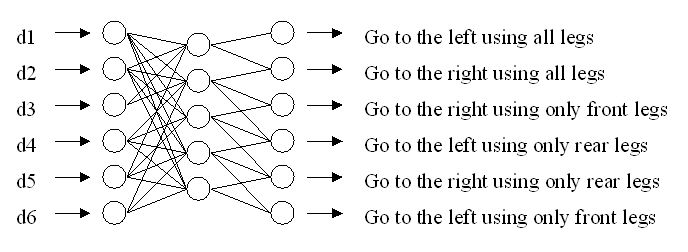
Figure 2. The neural network configuration.
Programs were developed using
OpenR which is the
development environment based on gcc (C++) which is used on robots
created by Sony.
Videos of
my participation and other teams participation can be seen here.
This site was last updated
07/06/14
|


